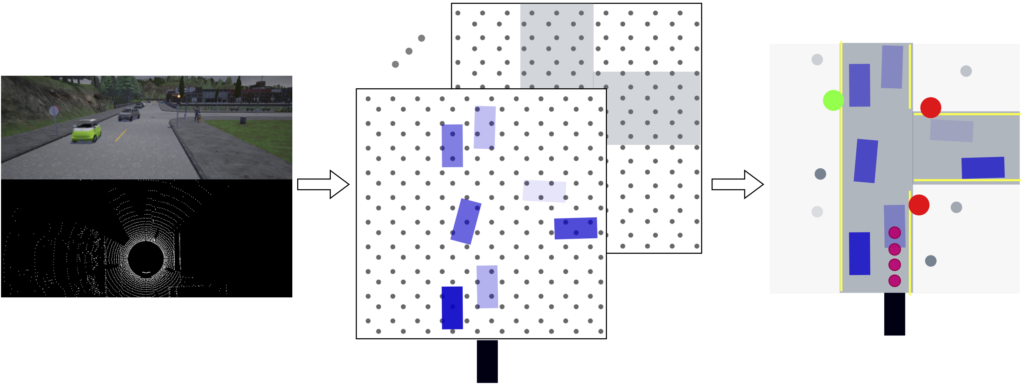
In this video from the simulation environment CARLA, we challenge the agent by injecting wrong obstacles (empty red boxes) in front of it. The agent is able to avoid braking for wrong obstacles, but instances later gets to a full stop to avoid a collision with a real obstacle – another car.